
Immersion scanner
In immersion testing, the transducers are placed in the water, above the test object, and a beam of sound is projected. Ultrasonic immersion testing has many applications and is suitable to provide detail analysis of material structure based on the scanner material surface.
In immersion testing, the transducers are placed in the water, above the test object, and a beam of sound is projected. Ultrasonic immersion testing has many applications and is suitable to provide detail analysis of material structure based on the scanner material surface.
Our developed ultrasonic immersion scanners suit laboratory environments and some special industrial applications. All immersion scanners are custom designed and built to suit clients’ nondestructive testing needs and requirements.
Our ultrasonic immersion scanners are robust modular systems composed of mechanical and ultrasonic components that are all controlled by our real-time, data acquisition and analysis software package: CScan.
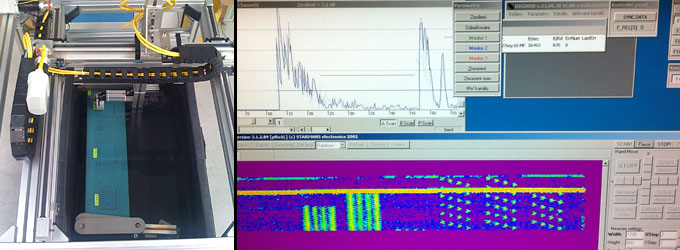
The CScan software cooperates with DIO 2000 program which has to be installed and properly configured too. CScanNew now communicates with DIO 2000 via a few files. The main screen of CScan software is shown on the following picture:
There are many buttons in the main screen that can be used to control the motor and movement in all coordinates. Within the configuration screen, the following sections can be configured:
- X-Motor and Y-motor section describes motor steps to length gear and other options - their will be described below.
- In the Units section you can select your native units for length-based values.
- Main direction specifies what motor makes the main move and at which speed and whether the scan is bidirectional or not.
- Measurement section describes scan Width and Height (length) of the scanned object, interpreted value name and range and the data source.
X(Y) Motor:
- Gear - specifies motor to length gear. Standard motors have 200 steps by rev. The length depends on transfer mechanism.
- Invert directions - changes the movement orientation.
- Port - determines COM port and baud speed on which the motor controller communicates.
- Step - distance between two scanned points.
- Offset - an additional length on both sides of width/height. (Total width will be Width + 2 x Offset)
- maxV - maximal motor speed in steps/sec.
- maxA - maximal motor acceleration in steps/sec2.
- Ctrl. type - controller type. There are two types in the moment - STARMANS and STARMANS two motors. The 2nd type is used for dual power for one direction.
- max I - maximal motor current.
- Max width - maximal available length of the X-move for limit checking. Max height - maximal available length of the Y-move for limit checking.
This sophisticated software is suitable for all STARMANS scanners and fulfils all basic and advanced requirements to suit really a challenging applications.
Contact Us
V Zahradách 24, 180 00 Prague 8, Czech Republic EU
Phone: +420 283 842 063, Fax: +420 283 841 067
www.starmans.cz, E-mail: ndt.starmans@gmail.com